Новое поколение привязной системы для квадрокоптеров
Квадрокоптеры используются в различных областях, от наблюдения до манипуляций и исследований других планет. В то время как эти аппараты в основном применяются для пассивных задач, таких как наблюдение и фотографирование, исследовательские группы и промышленность активно исследуют возможности использования летательных аппаратов для манипуляций, включающих схватывание/позиционирование, сборку/разборку деталей или транспортировку грузов с использованием одного или нескольких аппаратов. Квадрокоптеры и другие беспилотные летательные аппараты обладают уникальной способностью манипулировать объектом без ограничений в рабочем пространстве. Однако летательные аппараты ограничены во времени полета, грузоподъемности и т. д. из-за ограниченных аппаратных возможностей и источника питания. Особенно высокий спрос на энергию возникает при выполнении манипуляций в дополнение к полету. Понимание различных факторов, влияющих на энергопотребление квадрокоптеров, является необходимым первым шагом для улучшения времени полета и дальности. Были исследованы различные инновации, направленные на увеличение времени полета/дальности квадрокоптеров. Методы, такие как замена батарей на земле или замена батарей в полете с использованием других квадрокоптеров, позволяют увеличить время полета более чем в 4 раза. Другие методы, такие как использование батарей в нескольких коптерах, также позволяют увеличить время полета и дальность.
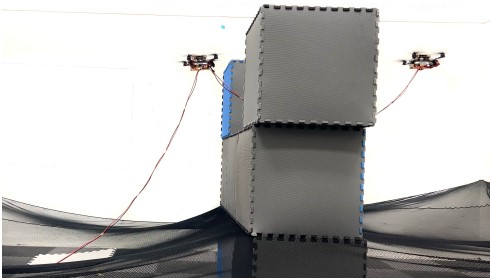
Рис.1 Эксперимент, демонстрирующий два квадрокоптера, связанных с помощью одного кабеля, который подает питание от внешнего источника энергии. Квадрокоптеры электрически соединены параллельно. Несколько квадрокоптеров могут быть скооперированы, чтобы достичь полета с привязкой над неизвестной или сложной местностью, расширяя горизонтальную досягаемость квадрокоптера.
Однако эти системы могут разрядиться, если не заменить их своевременно, и потребуется посадка квадрокоптеров, что пагубно влияет на выполнение целей, названных ранее.
Альтернативным подходом к увеличению времени полета является подача питания через внешний трос от стационарной или подвижной наземной станции. В то время как привязной квадрокоптер ограничен в дальности полета и маневренности, в таких приложениях, как анализ атмосферы, строительные/индустриальные наблюдения, наблюдение или выполнение различных операций в воздухе, выбор привязки квадрокоптера является разумным компромиссом между маневренностью и увеличенной длительностью полета. Их использование также было продемонстрировано в различных коммерческих деятельностях, таких как сбор фруктов в саду или очистка зданий и лопастей ветряных турбин. В данной работе мы изучаем привязанную систему квадрокоптера и анализируем различные факторы, влияющие на выбор источника питания, параметров троса и т. д.
A. Связанные работы
В прошлом исследовались привязанные квадрокоптерные системы к фиксированной или движущейся базе. Алгоритмы управления для привязанных квадрокоптеров были разработаны так, что трос моделируется как безмассовая жесткая связка. Это предположение справедливо для случаев, когда масса кабеля значительно меньше тяги, создаваемой квадрокоптером. Для учета массы кабеля во время динамических маневров трос моделируется как серия сосредоточенных массовых звеньев B. Катенарные модели используются для моделирования троса B, однако они могут использоваться только в условиях квазистатического режима. Кроме того, также изучались системы из отдельных привязанных квадрокоптеров.
Б. Вклад
В данной работе исследуются привязные квадрокоптеры, питаемые через трос с использованием внешнего источника питания. Вклад данной работы заключается в следующем:
- Рассматриваются различные электрические и механические элементы, влияющие на энергопотребление одиночного привязного квадрокоптера в условиях практически статического зависания.
- Формулируется энергопотребление от источника питания как функция массы транспортного средства и кабеля, сопротивления, положения квадрокоптера в зависимости от фиксированного конца троса, входного напряжения и прогнозируем потребляемую мощность для заданной конфигурации.
- Анализ показывает существование критической высоты, после которой физически невозможно поддерживать квадрокоптер в воздухе.
- Показаны экспериментальные результаты, подтверждающие аналитические предсказания.
- Демонстрируется применение множественных привязных квадрокоптеров, летящих через коридор.
В. Организация
Остальная часть работы организована следующим образом. В разделе II описывается система с одиночным привязным квадрокоптером и предоставляется краткий обзор динамики системы. Раздел III формулирует энергопотребление и требования к источнику питания для системы привязного квадрокоптера и обсуждает аналитические решения. Наконец, в разделе IV представлены экспериментальные результаты, подтверждающие аналитические решения. Заключительные замечания приведены в разделе V.
ОПИСАНИЕ СИСТЕМЫ КВАДРОКОПТЕРА НА ПРОВОДЕ.
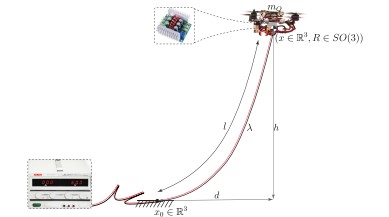
Рис 2. Схема полета привязного квадрокоптера с внешним источником питания. Для питания квадрокоптера используется внешний источник питания с высоким напряжением. Для снижения потерь мощности при передаче на борту квадрокоптера используется преобразователь напряжения с понижающим коэффициентом, который снижает высокое напряжение источника до рабочего напряжения квадрокоптера.
В данном разделе описывается привязной квадрокоптер, питаемый через трос от внешнего источника. Будет кратко показана динамика привязных квадрокоптеров и представлены силы, возникающие в катенарной системе при практически статических условиях.
Предположим, что у нас есть однородный трос, подключенный к внешнему источнику питания и прикрепленный к квадрокоптеру, как показано на рис. 2. Один конец троса прикреплен к квадрокоптеру, а другой конец закреплен на земле в точке x0 ∈ R3 в инерциальной системе отсчета. Предполагается, что трос жестко прикреплен к центру масс квадрокоптера, то есть трос оказывает только силу переноса на квадрокоптер.
|
Переменная |
Определение |
|
mQ |
Масса квадрокоптера [кг] |
|
λ |
Масса троса на единицу длины [кг/м] |
|
L |
Общая длина троса [м] |
|
l |
Длина троса в полете [м] |
|
x0 ∈ R3 |
Точка контакта троса с землей [м] |
|
x ∈ R3 |
Положение квадрокоптера в инерциальной системе [м] |
|
R ∈ SO(3) |
Поворот от системы квадрокоптера к инерциальной системе |
|
Ω |
Угловая скорость в системе квадрокоптера |
|
{e1, e2, e3} |
Векторы базиса инерциальной системы |
|
f ∈ R |
Скалярная магнитуда тяги квадрокоптера [Н] |
|
M ∈ R3 |
Момент квадрокоптера в системе квадрокоптера [Н·м] |
|
T ∈ R3 |
Сила, действующая на квадрокоптер от троса в полете [] |
|
PQ |
Потребление энергии квадрокоптером во время зависания [Вт] |
|
ρ |
Сопротивление троса на единицу длины [Ом/м] |
|
Vs |
Напряжение на источнике питания [В] |
|
is |
Ток, поставляемый источником [А] |
|
∆Vs |
Падение напряжения на тросе [В] |
|
Vb,in, Vb,out |
Входное и выходное напряжение для понижающего преобразователя [В] |
Таблица 1. Список различных механических и электрических переменных, используемых в данной работе:
Положение центра масс квадрокоптера в инерциальной системе обозначается как x ∈ R3. Определим систему координат, связанную с телом квадрокоптера, расположенную в его центре масс, и пусть R ∈ SO(3) представляет поворот от системы координат тела к инерциальной системе. Масса и матрица инерции (в системе координат тела) квадрокоптера обозначаются как mQ и J соответственно. Полная длина троса от источника питания к квадрокоптеру равна L, а l - длина сегмента троса в полете. Предполагается, что трос однороден по всей длине с массой λ на единицу длины. В таблице 1 перечислены различные символы, используемые в данной работе. Динамика квадрокоптера с тросом без внешних возмущений, таких как сопротивление/ветер, может быть описана следующим образом:

где f ∈ R - магнитуда скалярного тягового усилия, M ∈ R3 - момент, вызванный винтами в системе, связанной с телом квадрокоптера, Ω - угловая скорость тела относительно инерциальной системы, выраженная в системе, связанной с телом, e3 - ось, направленная вверх (противоположно направлению гравитации). T - сила, действующая на центр массы квадрокоптера со стороны привязанного троса...
Равновесная кривая, образованная однородным тросом, подвешенным между двумя точками,
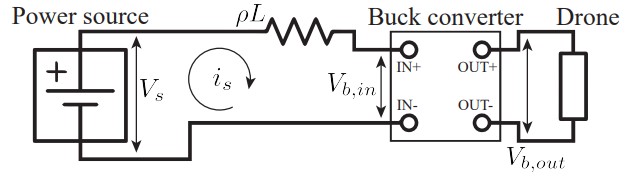
Рис.3. Схема предлагаемой архитектуры электропитания для привязного квадрокоптера. Высокое напряжение используется для передачи энергии через трос с целью снижения сопротивления, а снижающий постоянное напряжение (buck) преобразователь постоянного тока (DC-DC) подключается к квадрокоптеру для снижения напряжения до уровня, пригодного для работы квадрокоптера.
...представляет собой катенарную кривую, где уравнение катенары (цепной линии) в 2D плоскости с использованием параметров a, b, c может быть записано как…
Уравнение (3)
и может быть численно решено с использованием положения конечных точек. В условиях нависания под псевдо-статическими условиями мы можем предположить, что трос между квадрокоптером принимает форму катенары. Для тросов без кручения катенарная форма сегмента троса l лежит в вертикальной катенарной плоскости С между точками подвеса x0 и x. Пусть RC - поворот от плоскости катенары к инерциальной системе. Из-за симметрии в системе с тросом мы можем без потери общности предположить, что плоскость катенары С совпадает с плоскостью e2e3 в точке нависания. Используя уравнение катенары (3) и условие псевдо-статического равновесия, натяжения на конечных точках могут быть решены как;

Уравнение (4)
h и d представляют собой горизонтальное и вертикальное расстояния квадрокоптера от фиксированного конца троса в плоскости катенары C. Дополнительные детали о вычислении натяжений можно найти в приложении A. При h = l и d = 0 (когда квадрокоптер находится вертикально над фиксированной точкой на земле), сила, вызванная тросом, равна силе тяжести сегмента троса в полете. Типичный квадрокоптер питается от литий-полимерных аккумуляторов. Для квадрокоптера на тросе подается питание от внешнего источника постоянного тока. Трос служит проводником для передачи энергии. На борту квадрокоптера может быть использовано понижающее напряжение преобразователь, в зависимости от входного источника питания. Для оптимального проектирования системы питания и выбора типа троса для полета квадрокоптера на тросе необходимо понять влияние различных конструктивных параметров. Зависимость потребляемой мощности от количества генерируемого квадрокоптером тяги является функцией позиции квадрокоптера x и позиции фиксированного конца троса x0. Потребление энергии также зависит от маневров, которые выполняет квадрокоптер, поэтому для данной работы мы ограничиваем полеты только ховерингом. В следующем разделе мы анализируем различные электрические и механические параметры, которые влияют на потребление энергии квадрокоптера на тросе в парящем режиме.
АНАЛИЗ СИСТЕМЫ ПРИВЯЗНОГО КВАДРОКОПТЕРА
В этом разделе мы анализируем потребление энергии и требования к источнику питания для одиночного квадрокоптера, связанного с источником питания. В первой части раздела мы ограничиваем анализ вертикальным полетом. В последующей части мы анализируем влияние горизонтальной компоненты силы троса. Схема системы, объясняющая различные параметры, показана на рис. 2, а схема схемы показана на рис. 3.
А. Потребление энергии квадрокоптером в полете
Масса квадрокоптера mQ включает все компоненты на квадрокоптере, исключая трос. Масса на единицу длины троса λ включает как живую, так и нейтральную проводку. Длина части троса в полете (не контактирующей с землей) равна l. В режиме полета общая тяга, создаваемая квадрокоптером, описывается уравнением (1):
Уравнение 5.
Когда квадрокоптер находится в парящем режиме вертикально над x0, общая тяга равна силе, необходимой для поднятия массы mQ и массы троса λl.

Используя анализ мощности на основе модели диска привода, представленной ранее, мы утверждаем, что потребление электрической мощности привода определяется следующим образом:

где константа мощности cp является функцией размера пропеллера Aprop, плотности окружающего воздуха ρ-air, гравитации, КПД пропеллера η-prop на основе показателя эффективности пропеллера, КПД привода η-pt и количества пропеллеров n.

Предполагается, что КПД пропеллера и привода являются постоянными и пренебрегаем потреблением энергии датчиками и компьютерами на борту.
B. Анализ питания электроэнергией
Общая длина троса между источником питания и квадрокоптером составляет L и называется "электрической длиной" кабеля. Сопротивление троса на единицу длины принимается равным ρ. Таким образом, сопротивление троса равно ρL. Напряжение и ток источника питания обозначаются как Vs и is соответственно. Падение напряжения на тросе тогда равно ∆Vs = isρL. Следовательно, входное напряжение и ток на преобразователе понижения напряжения составляют (см. рис. 3 для справки):

«Для одной и той же системы квадрокоптера постоянная мощности зависит от окружающих факторов, таких как плотность воздуха и ускорение свободного падения. Поэтому cp будет разным в различных окружающих средах, таких как другие планеты или луны. Например, на Марсе сила тяжести составляет 38% от земной, а плотность воздуха - 1,7% от земной. В результате постоянная мощности будет примерно в 1,8 раза выше, чем на Земле. Это означает, что питание от троса будет иметь значительное влияние на Марсе, поскольку аккумуляторы будут разряжаться почти вдвое быстрее по сравнению с Землей.»
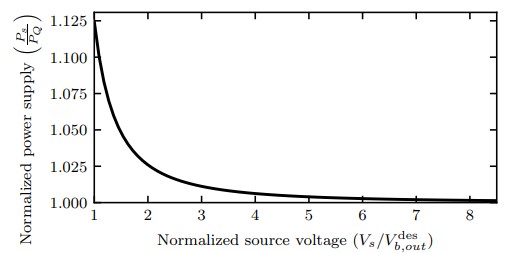
Рис. 4: График зависимости мощности источника Ps от напряжения источника Vs. Мощность нормализована по электрическому потреблению квадрокоптера PQ при условии, что все остальное (высота парения, параметры троса и т. д.) фиксировано. Напряжение источника нормализовано по желаемому входному напряжению для квадрокоптера
Желаемое выходное напряжение понижающего преобразователя (1) задается пользователем, а фактическое выходное напряжение Vb,out приблизительно постоянно, пока Vb,in > Vdesb,out. Если предположить КПД преобразования напряжения равным ηb, то входные и выходные параметры бакового (понижающего) преобразователя могут быть связаны следующим образом:

- (1)

Обычно КПД является функцией отношения преобразования напряжения Vb,out/Vb,in и мощности, которую необходимо преобразовать. Однако для заданной системы квадрокоптера и высоты парения мощность и выходное напряжение фиксированы, поэтому мы можем считать ηb постоянным. Обратите внимание, что левая часть уравнения (11) представляет собой мощность, подаваемую на квадрокоптер PQ через трос. Мы можем подставить уравнения (7), (9) и (10) в (11), чтобы получить следующее:

Обратите внимание, что все параметры в уравнении выше либо известны через измерения и эмпирические данные, либо являются параметрами проектирования системы, за исключением тока питания is. Следовательно, данная формула может быть использована для предсказания выходного тока от источника питания и, следовательно, мощности Ps от источника питания. Уравнение (12) является квадратным уравнением относительно is с двумя положительными корнями. Хотя оба корня имеют физический смысл, более высокий корень не имеет значения, поскольку он соответствует очень высокому току, который приводит к очень высоким потерям из-за сопротивления и той же мощности, поставляемой квадрокоптеру, что и у более низкого корня. Поэтому рассматривается только корень с более низким значением. С точки зрения эффективности и ограничений источника питания, интерес представляет мощность, поступающая от источника питания. Поэтому мы преобразуем уравнение в квадратное уравнение относительно Ps. Левая часть уравнения (12) обозначается как PQ(x). С такой нотацией квадратное уравнение выглядит следующим образом:

Подходящим решением в полностью раскрытом виде является следующее:
Рис. 5: Мощность, подаваемая источником питания Ps, и электрическое потребление квадрокоптера PQ

относительно высоты парения квадрокоптера h (с вертикально опущенным тросом), при условии ηb = 1. Для определенной конфигурации физически невозможно удерживать квадрокоптер выше критической высоты hc. Обратите внимание, что требование к источнику питания по-прежнему ограничено на критической высоте. Это ограничение возникает потому, что любой дополнительный ток от источника питания увеличивает потери от сопротивления и не преобразуется в полезную мощность для квадрокоптера.

C. Поставляемая мощность относительно напряжения источника
Произвольное увеличение напряжения Vs не приводит произвольно к уменьшению мощности Ps. При Vs → ∞, имеем ∆Vs → 0, но источник питания все равно должен поставлять необходимую мощность для квадрокоптера. В идеальном случае, когда достигнуты указанные выше пределы и у нас есть идеальный баковый(понижающий) преобразователь с КПД 100%, поставляемая мощность относительно входного напряжения будет выглядеть, как показано на рис. 4. Однако в практических сценариях КПД бакового преобразователя зависит от коэффициента преобразования, частоты переключения, преобразуемой мощности и т. д. В результате, в зависимости от параметров, обычно будет оптимальное входное напряжение, при котором мы минимизируем поставляемую мощность.
D. Поставляемая мощность относительно сечения провода
Значения массы и сопротивления на единицу длины для разных сечений провода зависят от производителя и заранее неизвестны. Однако для заданного производителя мы можем предположить общую тенденцию для сопротивления и массы. С уменьшением сечения провода масса троса уменьшается, а сопротивление увеличивается. Однако эта информация, в общем случае, недостаточна для прогнозирования поведения поставляемой мощности относительно используемого сечения провода, так как зависимость от параметров ρ и λ является нелинейной и сложной, как видно из уравнения (14). Эмпирические значения рассчитываются в разделе IV для получения представления о таких тенденциях.
E. Поставляемая мощность относительно высоты парения квадрокоптера
В этом подразделе мы рассматриваем парение квадрокоптера с вертикально опущенным тросом, то есть механическая длина кабеля, поднятая квадрокоптером l, просто равна высоте h, на которой летит квадрокоптер. Электрическая длина по-прежнему фиксирована и равна L. Обратите внимание, что в уравнении (14) термин внутри квадратного корня строго убывает при l = h. Поэтому он достигнет нуля при некоторой критической высоте квадрокоптера hc, после которой источник питания не сможет обеспечить достаточную мощность для парения квадрокоптера - это происходит потому, что увеличение тока приведет к увеличению потерь от сопротивления, и останется недостаточно мощности, чтобы удовлетворить потребности квадрокоптера. Мы хотели бы подчеркнуть, что это ограничение связано не с источником питания, а с системой квадрокоптера и тросом из-за физических параметров, таких как сопротивление и требования к энергопотреблению. Критическую высоту можно рассчитать следующим образом:
Если высота, на которой потери от сопротивления превосходят фундаментальное предельное значение источника питания, превышает электрическую длину L троса, то мы можем летать в любом месте, разрешенном механическими ограничениями, наложенными на трос, которые подробно рассматриваются в разделе III-F. Однако в другом случае нам нужно быть осторожными при выборе высоты парения, так как электрические ограничения запрещают квадрокоптеру парить выше этой критической высоты, даже если механические ограничения троса позволяют это. Обратите внимание, что при парении на критической высоте потери мощности от сопротивления точно вдвое превышают мощность, подаваемую источником. Пример графика для поставляемой мощности, потребляемой мощности квадрокоптера и потерь мощности от сопротивления относительно высоты парения показан на рис. 5.
Критическая высота парения фактически определяет радиус действия нашей системы, и некоторые приложения могут требовать большой высоты парения. Один из простых способов увеличения этой высоты - увеличение напряжения питания Vs и использование соответствующего преобразователя напряжения на квадрокоптере для понижения до номинального напряжения квадрокоптера. Это аналогично тому, что делают сети электропитания для минимизации потерь на линиях передачи.
Интересный случай возникает, когда критическая высота совпадает с длиной троса - это позволяет максимизировать возможную высоту парения, при условии, что все остальное (напряжение питания, массы и т. д.) остается постоянным. Мы назовем это критической длиной Lc = hc, max. Исходя из (16), мы можем получить следующее выражение:

Это полином пятого порядка относительно Lc, который не имеет аналитического решения. Численные значения для нашей системы рассчитываются в разделе экспериментальной проверки.
F. Поставляемая мощность относительно катенарных сил
В предыдущем разделе мы анализировали мощность, необходимую для вертикального полета системы квадрокоптера с тросом. Однако из уравнения (5) видно, что во время парения общая тяга, необходимая квадрокоптеру, зависит от катенарной силы T, которая, в свою очередь, зависит от того, насколько далеко квадрокоптер находится от закрепленного конца на земле. Поэтому потребляемая/поставляемая мощность является функцией положения квадрокоптера (h, d) в вертикальной плоскости.
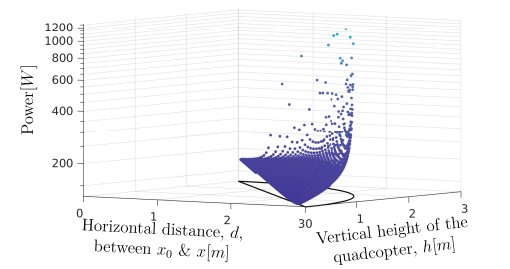
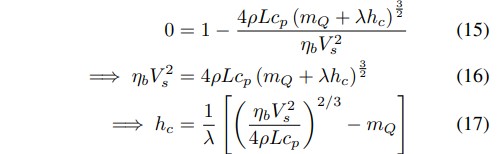
Рис 6.Аналитическая модель поставляемой мощности с использованием (19) и (14). Мощность, необходимая и натяжение в тросе, достигают произвольно больших значений по мере достижения физического предела длины троса.
Исходя из двух концов троса, во время парения форма катенары может быть вычислена путем решения катенарного уравнения (4). Направления натяжения на концах вычисляются путем нахождения градиента катенарного уравнения. Наконец, катенарные силы вычисляются в равновесии квазистатического состояния. Чистая тяга, создаваемая квадрокоптером в уравнении (5), преобразуется в увеличенную массу следующим образом:

Дополнительная масса m¯ используется для вычисления потребляемой мощности квадрокоптера с помощью уравнения (7) следующим образом:

Наконец, с использованием уравнения (14), мы имеем требования к мощности от источника для катенарных систем. На рисунке 6 показана поставляемая мощность Ps в зависимости от высоты h и расстояния от закрепленного конца троса d. Как видно на рисунке, мощность Ps асимптотически стремится к бесконечности к физическому пределу троса, то есть для полного расширения троса требуется произвольно большая сила. Это соответствует асимптотическому случаю, когда катенарная кривая является прямой линией.
ЭКСПЕРИМЕНТАЛЬНАЯ ПРОВЕРКА
В этом разделе мы представляем экспериментальную проверку анализов, представленных в предыдущем разделе. Во второй части раздела мы представляем систему с двумя квадрокоптерами, механически соединенными последовательно с использованием одного троса, который обеспечивает питание обоим квадрокоптерам от внешнего источника постоянного тока. Следует отметить, что электрически оба квадрокоптера соединены параллельно, чтобы обеспечить работу обоих при номинальном напряжении.
А. Настройка
Эксперименты проводятся в закрытом помещении с системой захвата движения для отслеживания положения и ориентации. Для тестирования полетов в парении с использованием троса использую ол тся специальные квадрокоптеры, оснащенные датчиками тока и напряжения для измерения показаний на борту. К показаниям тока и напряжения применяется фильтр низких частот, и мощность, потребляемая квадрокоптером, вычисляется на основе этих показаний. Мы используем силиконовый изолированный электрический провод длиной L = 7.62 м для питания через трос, а также источник постоянного тока мощностью 1200 Вт с высоким напряжением (максимум 60 В) и высоким током (максимум 20 А) для питания квадрокоптеров. Для напряжений питания выше 12,6 В (рабочее напряжение для использованных в квадрокоптерах BLDC-двигателей) на квадрокоптерах установлены коммерчески доступные преобразователи постоянного напряжения (баковые (понижающие) преобразователи)), чтобы снизить напряжение до 12,6 В.
|
Калибр проволки |
λ [kg m−1] |
ρ [Ω m−1] |
Диаметр, мм |
|
10 AWG |
0.142 |
0.01299 |
2.588 |
|
12 AWG |
0.095 |
0.01659 |
2.053 |
|
14 AWG |
0.055 |
0.02408 |
1.628 |
Таблица 2. Характеристики силиконовой изолированной электрической проволоки, использованной в качестве источника питания в экспериментах:
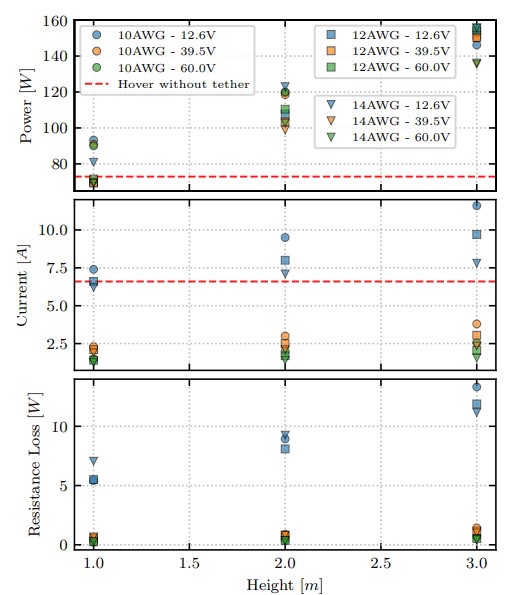
Рис 7. Измеренная мощность на внешнем источнике постоянного тока в зависимости от высоты полета квадрокоптера (с вертикально опущенным тросом) для разных входных напряжений и диаметров проволоки.
B. Одиночный привязной квадрокоптер в парящем режиме по отношению к дизайн-фактору
Мы сравниваем потребление энергии привязного квадрокоптера, с опущенным вертикально тросом, с учетом трех различных факторов конструкции. Были проведены эксперименты по ховер-полету с опущенным вертикально тросом для вычисления потребляемой мощности при разных диаметрах проволоки, входных напряжениях и высотах. Физические характеристики различных тросов приведены в таблице II. Масса квадрокоптера mQ остается постоянной для всех испытаний.
Графики потребляемой мощности и тока, измеренные на входе источника, представлены на рис. 7. Как показано на графике, измеренная мощность для привязных полетов, как и ожидалось (из-за дополнительной массы троса), выше, чем для номинального полета квадрокоптера с использованием батареи. Как видно из таблицы 2, масса на единицу длины троса 10AWGb выше, чем у остальных, что приводит к большему потреблению мощности для троса 10AWG, как видно из графика.
C. Прогнозы на основе анализа
Мы вычисляем значения с использованием формул, полученных в анализе, чтобы сравнить их с экспериментальными значениями. Константа мощности для квадрокоптера, использованного в данном наборе экспериментов, составляет cp = 144.538 Вт/кг3/2 на основе предыдущих эмпирических данных. Используемая длина троса равна L = 7.62 м. Поскольку у нас есть много входных переменных конструкции, мы представляем значения только для троса 12AWG при напряжении 12.6 В (произвольно выбранном).
Для высот ховера {1.0, 2.0, 3.0} м предсказанные значения подаваемой мощности Ps составляют {81.95, 102.15, 124.57} Вт. Экспериментальные значения подаваемой мощности составляют {83.16, 100.80, 122.22} Вт. Мы видим, что значения хорошо соответствуют друг другу с ошибкой менее 5% для всех сравнений, включая значения для других диаметров проводов и напряжений питания.
Мы также можем вычислить критическую высоту и длину для провода 12AWG при питании 12.6 В с использованием (17) и (18). Для длины троса 7.62 м критическая высота составляет hc = 11.77 м.
В данном случае hc > L, поэтому квадрокоптер может летать в любом месте, допустимом механически тросом. Критическая длина вычисляется как Lc = 9.43 м. Это максимальная высота, на которой может находиться квадрокоптер, и это возможно только при выборе критической длины троса.
D. Влияние катенарных сил на мощность
В данном разделе мы проводим эксперименты по ховеру (парящий режим) с использованием троса 10AWG при l = 3.0 м, закрепленного на поднятой платформе, как показано на рис. 8. Мы проводим испытания ховера в различных точках вдоль окружности в вертикальной плоскости с увеличением горизонтального расстояния d. Системе подается входное напряжение 12.6 В, и для квадрокоптера используется cp = 150.175 Вт/кг3/2, определенная эмпирически. Сравнивается экспериментальное потребление мощности с аналитическими результатами, предсказанными с использованием (19) и (14). Катенарные силы решаются с использованием (4) (подробности приведены в Приложении A).
Как видно из графика, аналитические предсказания близки к фактическим экспериментальным результатам. Хотя заданные установки находятся вдоль окружности радиусом l, квадрокоптер стабилизируется внутри меньшей окружности радиусом 2.839 м. Как обсуждалось в разделе III - F, требуемая мощность увеличивается асимптотически до бесконечности, по мере приближения к физическому пределу длины троса. Мы вычисляем аналитически требуемую мощность в точках вдоль радиуса 2.839 м, показанных на рис. 8 [верхний]. Требуемая мощность увеличивается с увеличением горизонтального расстояния из-за увеличения горизонтальной компоненты катенарных сил, а затем резко снижается. Это происходит из-за уменьшения вертикальной компоненты катенарной силы, поскольку некоторая из вертикальной силы, необходимой для поднятия троса, передается фиксированному концу троса.
E. Два квадрокоптера, подключенные к одному питающему тросу
В этом эксперименте мы используем два квадрокоптера, подключенных к одному тросу (одинаковый источник питания), электрически соединенных параллельно для обеспечения одинакового рабочего напряжения. Система с двумя привязными квадрокоптерами предлагает те же преимущества, что и система с одним привязным квадрокоптером, такие как увеличенное время полета и стабильное внешнее питание. Кроме того, двухквадрокоптерная система может использоваться для лучшей горизонтальной доступности, как показано на рис. 1, что позволяет работать над препятствиями или сложной местности, не подвергая опасности питающий трос.
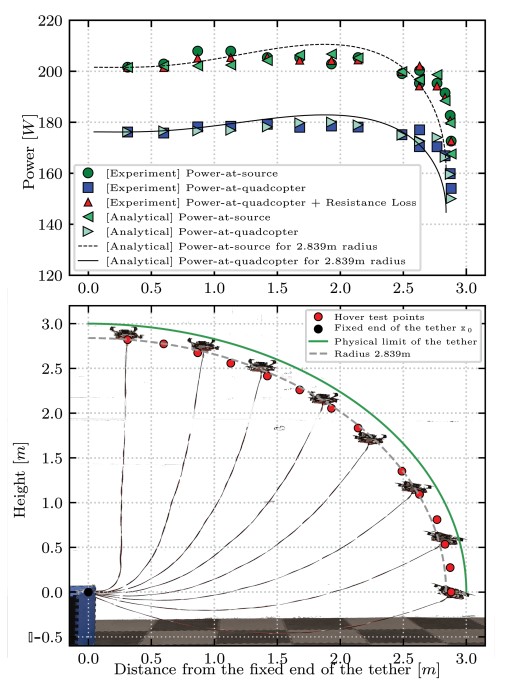
Рис 8. [Вверху] Экспериментальные и аналитические значения мощности на источнике питания и на квадрокоптере. Мощность увеличивается с увеличением горизонтальной силы, а затем резко снижается, когда некоторая из вертикальной силы, необходимой для поднятия троса, передается фиксированному концу троса. Также изображены предсказанные значения мощности питания (пунктирная линия) и предсказанное потребление мощности квадрокоптером вдоль радиуса 2.839 м (сплошная линия).
[Внизу] Визуализация точек теста на задержке; Зеленая линия показывает физически достижимый предел троса.
ЗАКЛЮЧЕНИЕ И ДАЛЬНЕЙШАЯ РАБОТА
В данной статье мы представили анализ тросовой системы с квадрокоптером для оценки электрического энергопотребления квадрокоптера и требования к энергоподаче для достижения нужной мощности квадрокоптеру при различных конфигурациях троса. В анализе были учтены различные механические, аэродинамические и электрические параметры системы трос-квадрокоптер. Мы обнаружили, что для любой тросовой системы с квадрокоптером существует критическая высота полета, выше которой квадрокоптер не сможет удерживаться независимо от поставляемой мощности. Мы также представили анализ сил катенарии, тяги квадрокоптера и требований к энергоподаче для различных конфигураций системы.
Анализ энергоподачи был экспериментально подтвержден путем полетов квадрокоптера на разных высотах, с поставкой различных напряжений от источника питания и использованием трех разных размеров провода. Анализ силы катенарии и энергопотребления также был экспериментально проверен путем полетов квадрокоптера в различных желаемых точках и измерения ориентации, тяги и энергопотребления. Экспериментальные значения хорошо соответствуют (с погрешностью менее 5%) предсказанным значениям из анализов, что подтверждает реалистичность использованных предположений в анализах.
Наконец, мы показали систему с двумя квадрокоптерами, питаемыми одним тросом, и продемонстрировали ее лучшую горизонтальную доступность по сравнению с одиночным тросовым квадрокоптером. Дополнительным преимуществом этой системы является выполнение распределенных задач, требующих работы квадрокоптеров вблизи друг от друга, например, сбор фруктов или уборка высотных зданий.
Одним из направлений дальнейшей работы является расширение анализа энергоподачи на систему из нескольких квадрокоптеров, работающих на одном тросе. Это позволит пользователям оптимально выбирать источник питания и размеры троса для своей конкретной системы. Также можно исследовать, что происходит при полете близко к критической высоте, описанной в статье. Можно также исследовать другие преимущества и ограничения использования нескольких квадрокоптеров на одном тросе.
Внедрение беспилотных технологий под ключ
Разработаем и подберём решения для вашего проекта: мониторинг, инспекции, автоматизация и контроль объектов
Ответ за 5–10 минут

Часто задаваемые вопросы
Современные привязные системы стали легче, компактнее и энергоэффективнее. Они обеспечивают более стабильное питание квадрокоптера, увеличенную мощность и расширенные возможности интеграции с различным оборудованием.
Они используются для длительного видеонаблюдения, мониторинга объектов, организации временной связи, освещения территории, обеспечения безопасности и проведения специальных операций.
Большинство современных решений разрабатывается с учетом эксплуатации на открытом воздухе. Однако допустимые погодные условия зависят от характеристик конкретной модели и рекомендаций производителя.
Компании сокращают расходы на обслуживание беспилотников, получают возможность непрерывного наблюдения за объектами и уменьшают количество перерывов, связанных с заменой аккумуляторов.
Развитие технологий направлено на повышение мощности, снижение массы оборудования, интеграцию с искусственным интеллектом, автоматизацию управления и расширение сфер применения привязных беспилотных комплексов.
